Exoskeleton Support for Varicose Disease
Project Brief: Exoskeleton Support for Varicose Disease
Overview
Project Name: Exoskeleton Support for Varicose Disease
Developer: Faisal Abuhayyeh
Affiliation: Techworks Jordan
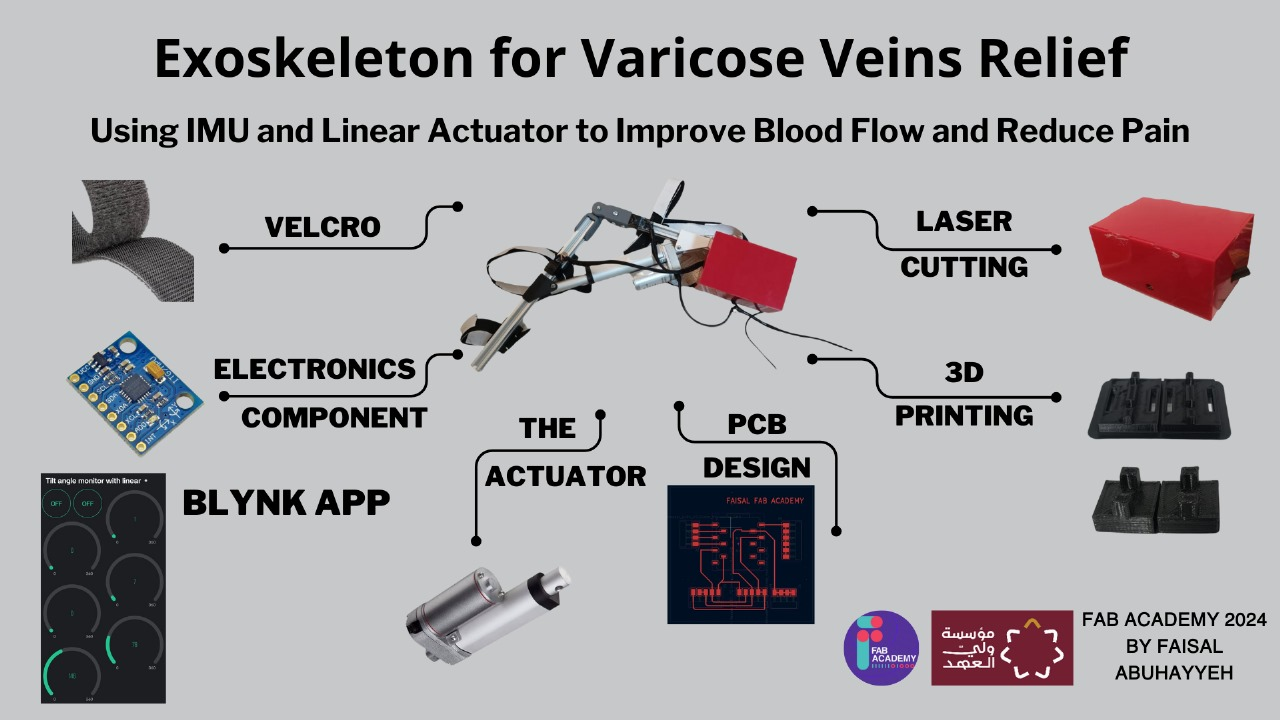
Objective: To design and develop an exoskeleton device that improves blood flow and reduces pain for individuals with varicose disease by using an IMU sensor, linear actuator, and a control system via the Blynk app.
Problem Statement
Varicose disease causes discomfort and pain due to poor blood circulation in the legs. Traditional treatments are not always effective, and there is a need for innovative solutions that can provide mechanical support and improve blood flow.
Project Description
The exoskeleton support device aims to assist individuals with varicose disease by using advanced technology to enhance blood flow and reduce pain. The device features:
IMU Sensor:
- Tracks the angles and movements of the leg in real-time to adjust support.
Linear Actuator:
- Provides mechanical assistance to improve blood circulation.
Blynk App:
- Allows users to control the level of support via their smartphones.
Systole and Diastole Simulation:
- Mimics the natural pumping action of the leg to enhance blood flow.
Usage:
- Designed to be used three times a day for ten minutes each session.
Conclusion
The exoskeleton support device represents a significant advancement in aiding individuals with varicose disease. By combining mechanical support with smart technology, it provides a practical and effective solution to improve blood circulation and reduce pain, enhancing the quality of life for users.
Principles and Practices

Fabrication
Electronics Design
Final Result
Slide